IO Ninja and Python Can Jam Together IO Ninja + Python = ❤ As you know, IO Ninja excels as a UI debugger for serial, network, USB, and all other forms of communication. It offers a slick, polished user interface, a beautiful and lightning-fast logging engine, a sophisticated hex packet editor with packet templates, regex-based...
Read More
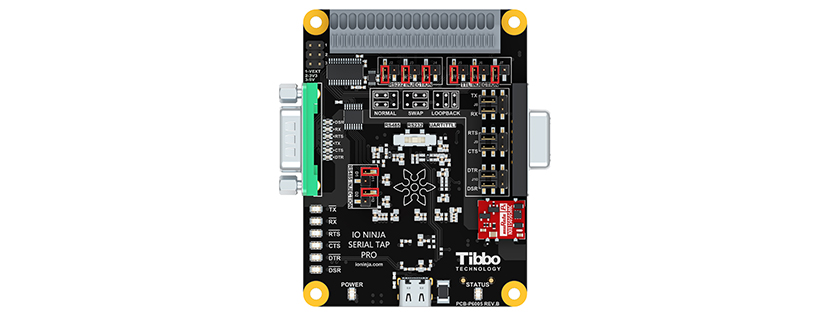
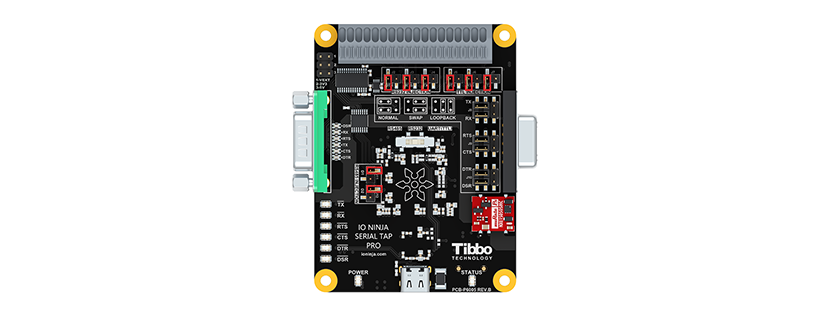
Tibbo Technology Introducing Auto-Baud Rate Detector in Serial Tap Pro At the time of its release last year, Serial Tap Pro was already the most advanced serial solution on the market, featuring: All-in-One interface support (RS232, RS422/RS485, TTL) Full galvanic isolation across all serial lines High baud rates (up to 2.5 Mbps) Guaranteed chronological sequencing with microsecond-precision 9-bit data decoding Automatic data...
Read More
Tibbo Technology - No More Reverse-Engineering Your Own Design Auto-Generated Datasheets for Custom TPS Configurations AppBlocks —Tibbo no-code, flowchart-based, in-browser development platform for building automation applications —will soon be able to produce PDF datasheets for your custom Tibbo Project System (TPS) configurations. As you already know, Tibbo Project System (TPS) devices offer unparalleled configuration flexibility...
Read More
IO Ninja and Python Can Jam Together IO Ninja + Python = ❤ The new Bare Mode in IO Ninja v5.9.1 enables test and debugging automation through external scripting. With Bare Mode, you can now run all IO Ninja plugins from the command line (CLI) and control them from your favorite scripting language: Python, JavaScript,...
Read More
This Is Not an AppBlocks Feature (Yet) Playground: AppBlocks Mobile App Creator https://appblocksmobilecreator.onrender.com Tibbo is actively experimenting with different ways of bringing useful AI functionality into AppBlocks. Despite recent advances in AI capabilities, getting a model to reliably create meaningful, working projects from a prompt remains an elusive (albeit a seemingly close) goal. One major...
Read More
Introducing Automatic Baud Rate Detection in Serial Tap Pro Serial Tap Pro just learned a new trick: Automatic Baud Rate Detection (ABR). And it’s not the usual pattern-based ABR you find elsewhere — this one actually works on any data. Why Do You Need ABR? Imagine troubleshooting a legacy system where devices communicate over RS485...
Read More
The End of IR Remotes? 📡 Record and Playback Commands From IR Remotes IR remote emulation support is here! Want to automate control of equipment that came with an IR remote? Now you can record and replay IR commands right from your AppBlocks flow. This gives you control over aircons, dehumidifiers, TVs, and other equipment...
Read More
Tibbo? Of Course I Remember Tibbo! Since 2001, Tibbo’s been pioneering IoT and automation, first known for their serial-over-IP (SoI) controllers. Tibbo is a technology company based in Taipei, focused on simplifying and accelerating the creation of smart devices and systems for the Internet of Things (IoT) and industrial automation. Tibbo’s main offering is the...
Read More
Build An Access Control System With Tibbo Tutorials A Practical Access Control Tutorial Tibbo’s access control tutorial series is designed to show you how to build a real-world solution using AppBlocks. The first project is a perfect starting point, demonstrating how to grant or deny access based on a user database. Even if you don't...
Read More
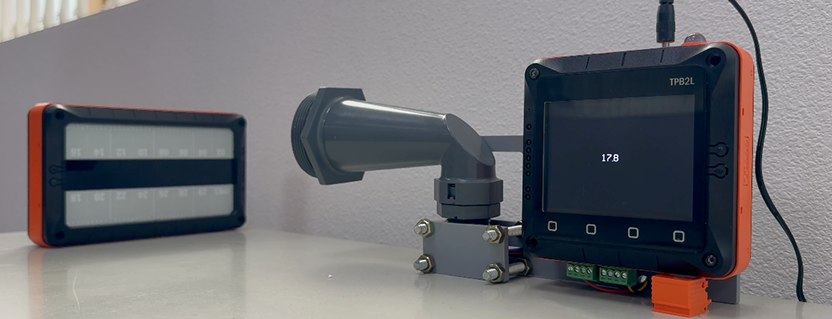
Working With the MaxBotix Ultrasonic Sensor and AppBlocks This week at AppBlocks: A distance meter and a look at the capabilities offered by AppBlocks and TPS. Distance Meter Demo w/ AppBlocks and TPS Thinking about integrating distance sensing into your projects? Do it with AppBlocks! Whether you're building a proximity alarm, a tank level sensor,...
Read More